RoboRobot - видео - все видео
Новые видео из канала RuTube на сегодня - 20 April 2026 г.
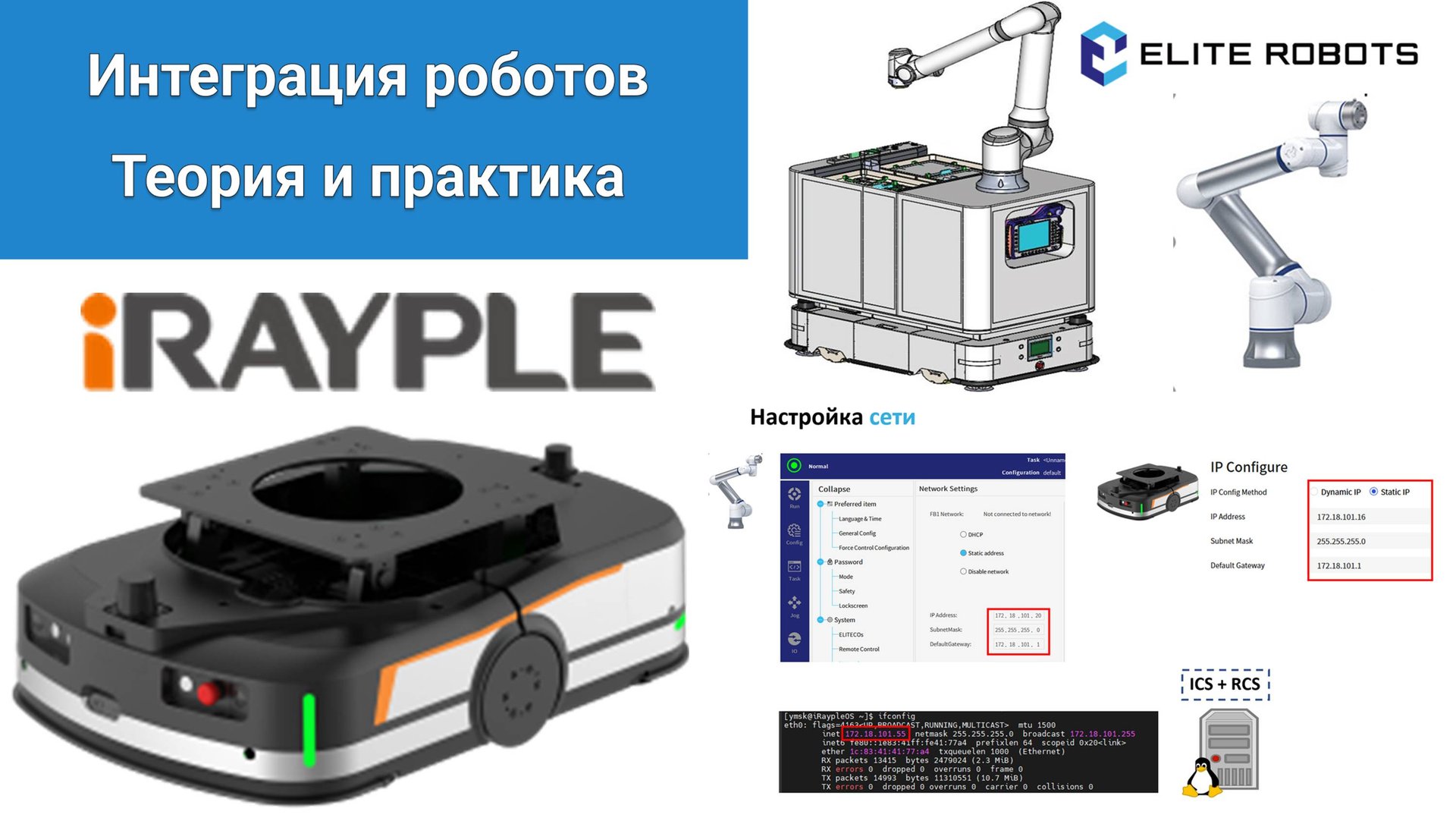
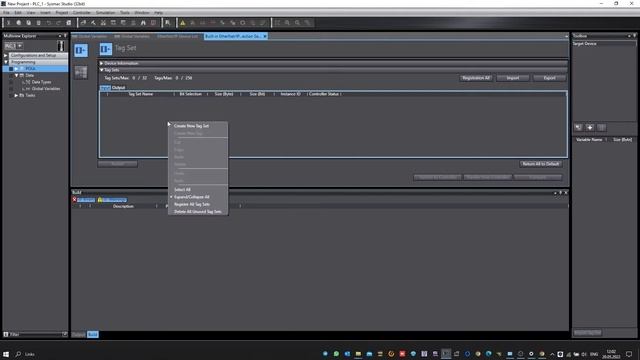
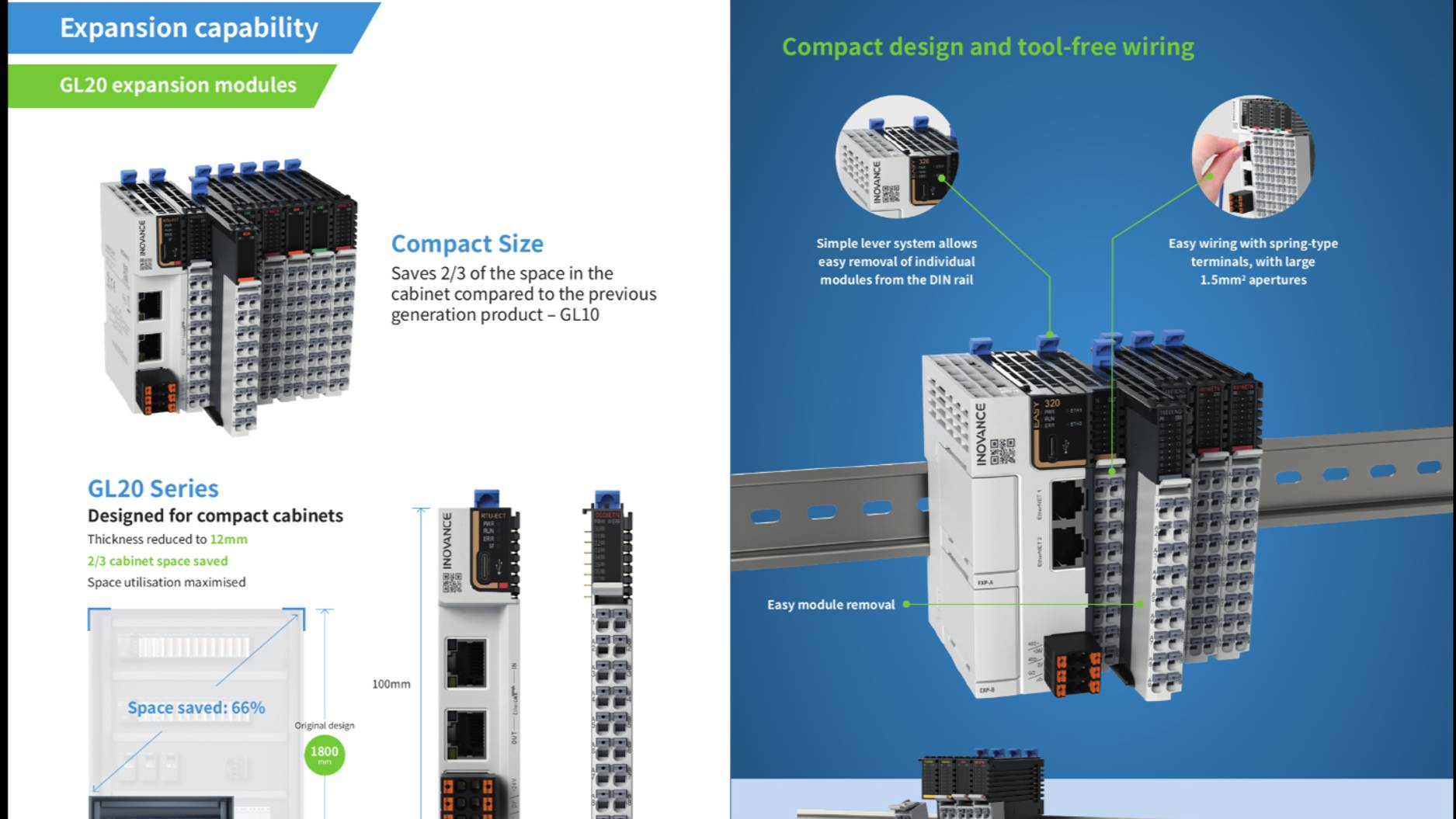
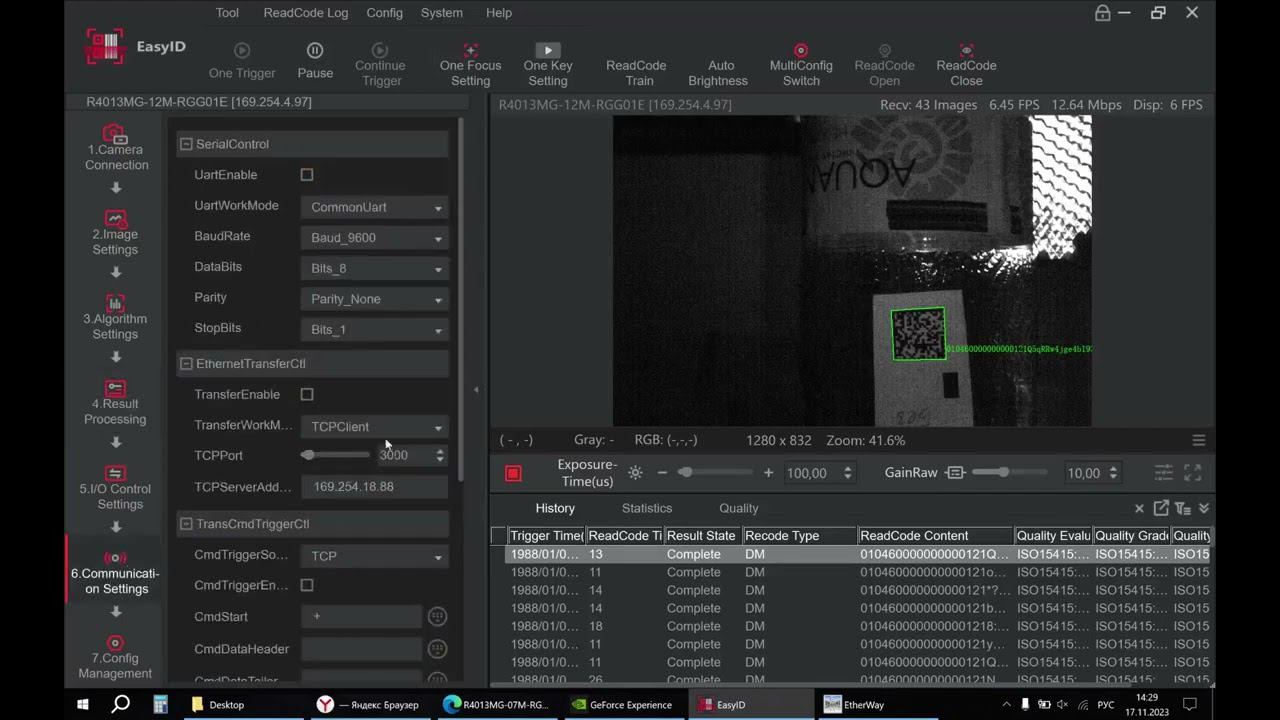
Коллеги, смотрим обзор проекта (испытательный стенд) на базе модульного частотного привода Inovance MD880 (представляет собой систему «мультидрайв» - инверторы питаются от общего звена постоянного тока, также включает в себя рекуперацию, общий выпрямительный модуль, модуль контроллерный, вводной, соединительный и т. д.). который имеет большой спектр возможностей, в частности, управление двигателями по скорости и моменту. Также понять тематику канала помогут наши другие ресурсы: https://www.youtube.com/@roborobot https://t.me/roborobot_ru https://rutube.ru/channel/42912154/ https://vk.com/roborobot_ru https://vkvideo.ru/@roborobot_ru https://t.me/roborobot_archive https://vk.com/machinerylab https://max.ru/id5406833958_bizА зачем роботам общаться между собой? 😊 Смотрим «как» интегрировать «Мобильного» робота-тележку с «Коллаборативным» роботом для возможности осуществления автономных манипуляций на территории всего помещения (цеха/цехов). В данном материале мы увидим теорию и практику по созданию так называемого Мобота и сможем планировать роботизированную логистику, независимую от человеческого фактора. Краткое содержание: 00:00:35 – Ожидаемый результат 00:01:30 – Что нужно для достижения цели – состав будущего Мобота (роботы, сервер. ПО…) и стадии интеграции 00:03:15 – Схема взаимодействия (сетевая интеграция) 00:06:05 – Создание карты для AMR 00:07:05 – Создание программы для Кобота CS 00:07:50 – Шаги работы с Modbus TCP 00:10:20 – Разберем задачу для Кобота и Мобильного робота 00:11:05 – Карта переменных Modbus TCP 00:14:00 – Начало Практической части – начинаем со сканирования карты для движения мобильного робота 00:13:30 – Создаем шаблон задачи 00:18:30 – Создание и настройка шлюза в веб-интерфейсе 00:24:15 – Переходим к программированию Коллаборативного робота 00:25:35 – Создали задачу – инициализация регистров Модбас, далее последовательные скрипты для загрузки деталей, выгрузки и т. д. 00:28:15 – Запускаем программы совместно и смотрим как взаимодействуют роботы. 00:31:18 – Отладка работы роботов – записываем значение и проверяем как роботы отрабатывают. 00:32:35 – Смотрим как отрабатывают регистры Modbus Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobot https://rutube.ru/channel/42912154/ https://vk.com/roborobot_ruКрутейший материал о том, как работать с модульными частотниками (система Мультидрайв), управляя с контроллера (Интеграция ПЛК Easy521 и MD800 через CAN или Ethercat): Смотрим в видео: - О ПЧ серии MD800 INOVANCE - Типичные применения MD800 - Из чего состоит MD800 - Платы расширения MD800 - Выпрямитель MD800 - Модули ПЧ MD800 - Сравнение со стандартными ПЧ - Интеграция ПЛК Easy521 и MD800, CAN - Интеграция Easy521 и MD800, Ethercat Материалы к видео: https://t.me/roborobot_archive/57 Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobot https://rutube.ru/channel/42912154/Протокол обмена данными Ethernet/IP позволяет легко и быстро настраивать коммуникацию между различными промышленными устройствами в формате 1:1 или 1:N без написания кода инициации и приема посылок. В этом видео мы показываем, как создать канал для циклической передачи данных между двумя контроллерами Омрон серии Sysmac, назначить тэги Data Link для обмена и отправить информацию из устройства в устройство. 00:00 Введение 00:31 О протоколе Ethernet/IP и Tag Data Link 02:00 Возможности коммуникации для ПЛК Омрон 02:34 Состав оборудования для демонстрации 03:13 Форматы данных для циклического обмена 03:48 Настройки коммуникации и тэгов в проекте Sysmac Studio 05:49 Настройка Ethernet/IP соединений и привязка тэгов 07:54 Загрузка проектов и настроек в ПЛК 09:27 Проверка передачи и приема данных 10:07 Диагностика работы сети Проект контроллеров: https://t.me/roborobot_archive/54Быстрый обзор процедуры обновления прошивки (Firmware) для ПЛК Inovance серии Easy (схожим образом прошиваются и другие ПЛК). Сами прошивки можно скачать на нашем резервном телеграмм канале: https://t.me/roborobot_archive/52В дополнение к нашему самому популярному видео на Ютуб о протоколе Модбас (ВК версия - https://vk.com/wall-226896269_7), выкладываем обзор возможных решений с Modbus RTU для контроллеров OMRON, программируемых в среде CX-One. Выкладываем код с примерами. Содержание и тайм-коды: 01:50 – обзор функциональных блоков, устанавливаемых с CX-One по умолчанию (интерфейсные, позиционирование. Работа с серво, со сканерами, работа с RFID, с терморегуляторами, с vision, с беспроводными устройствами и т. д.). 03:37 – Еще одно специализированное решение Омрон – библиотека для работы с частотным приводом (опрос до 32 инверторов) 05:25 – Easy Vaster Function - следующий вариант реализации Modbus RTU мастер на ПЛК под CX-One 08:15 – Практика. Смотрим небольшую программу. Которая опрашивает 2 температурных модуля ISP-DAS по 8 каналов каждый (пример удешевления системы на Омрон за счет сторонней распределенной периферии) 11:15 – И заключительный вариант реализации Modbus RTU – самописный функциональный блок от Жан Пьер Висковича (на основе без протокольного режима обмена). 12:50 – Также есть пример программы. И данное решение позволяет значительно сократить время разработки обмена данными с устройствами и т. д. Также смотреть: https://t.me/roborobot_ru https://www.youtube.com/@roborobot https://rutube.ru/channel/42912154/ Материалы к видео: https://t.me/roborobot_archive/45Отличный урок с теорией (00:01:05) и практикой (00:09:40) – хорошо подойдет и новичкам в программировании ПЛК, кто следует нашим курсам и специалистам с опытом, кто планирует новые проекты на ПЛК Inovance Easy. Также смотрим тайм-коды: 00:00:26 – Список обновлений (EASY supports OPC UA server, EtherCAT optimization, EtherCAT alias, axis unit conversion interface, network firewall function, inserting ST execution blocks in LD editor, Added GL20 module, New Ethercat contour control mode instructions, UDP communication supports multicast function, ST editor adds string and array related instructions…) 00:01:05 – Поддержка OPC UA 00:02:30 – Возможность вставлять в «ладдер» (LD) код на ST 00:03:20 – Разветвитель сети Ethercat 00:04:20 – Firewall для внешних подключений 00:05:04 – Расширение Motion функционала 00:05:40 – Появилась возможность добавлять пользовательские единицы – миллиметры, микроны, градусы… 00:08:04 – Добавление новых инструкций в LD и ST (ISET, IZSET, IRST, IZRST, IOUT, StringToAry, AryToString, ToAryByte, AryByteTo, AryAdd, ArySubv, AryMean, ArySD, ArySHL&ArySHR и др.) 00:09:40 – Начинаем практическую часть открываем среду разработки Autoshop, V4.10.1.0 00:10:10 – Вставляем ST в LD редакторе 00:11:00 – создали таблицу элементов. Структура «Серво» 😊 (для передачи по OPC UA) 00:14:10 – Переходим в режим мониторинга 00:16:30 – Видим уже прочитанные значения 00:18:30 – Подводим итоги Материалы (презентация и программа): https://t.me/roborobot_archive/44 Также смотреть: https://t.me/roborobot_ru https://www.youtube.com/@roborobot https://rutube.ru/channel/42912154/00:00:07 - Тема сегодняшнего обучения – это управление движением на базе контроллеров Омрон а именно из платформы Sysmac Studio 00:00:20 - Вообще любая задача управление движением начинается с выбора контроллера 00:02:32 - И также есть контроллеры с искусственным интеллектом, которые могут использоваться для задач предиктивной диагностики 00:02:54 – Разница между синхронными и не синхронными осями 00:05:00 - Три основных типа синхронизации 00:08:00 - Скан программы. Фиксированный цикл для всех контроллеров, и в одном скане происходит следующее… 00:08:38 – Поговорим о шине реального времени и о времени синхронизации обмена данными между ПЛК и нашим сервоприводом. И далее поговорим об таком понятии как Ось 00:09:45 - также виртуальные оси - они не привязываются к реальным осям но при этом их можно также использовать в программе 00:12:29 - к контроллеру платформы Sysmac можно подключать не только сервопривода компании Омрон, но также и сторонних производителей, но лучше проводить тестирование, потому что при привязке сторонних устройств может быть очень много тонких моментов 00:15:00- переходим в настройки серво осей – у нас появляется переменная оси и уже с этими осями мы работаем в программе. Ось это структура, которая в себе содержит очень много информации, такую как параметры конфигурирования, шкалирования, статус … 00:18:03 - если мы хотим использовать энкодер как ось – то нам нужен «осевой ПЛК» 00:18:58 - команды могут делиться на дискретные, непрерывные, синхронные, прочие 00:19:54 - позиционирование есть абсолютное и относительное - чем они отличаются друг от друга 00:21:02 - теперь есть ещё такое понятие как буфер если мы одновременно вызываем несколько команд, то в зависимости от задания этой переменной могут обрабатываться по-разному… 00:23:45 - Теперь переходим именно к среде разработки Sysmac Studio 00:25:52 - Итак, с чего начинается работа с ПЛК с управлением сервоприводов – для начала мы открываем вкладку … 00:27:10 - Если мы используем сервопривод не Омрон, либо какую-то любую другую технику, то мы должны добавить в библиотеку проекта xml фай файл конфигурации 00:29:47,279 у нас есть возможность полностью настраивать сервопривода - есть вкладка… 00:30:58 - есть режимы – абсолютное и относительное, позиционирование и также даже поиск нулевой метки - то есть мы можем уже сервоприводом покрутить… 00:31:19 – Datatrace - можно посмотреть мониторинг и анализ, вибраций и так далее 00:31:28 - Закончили с настройкой сети и далее переходим в раздел Motion Control Setup… 00:32:10 - у нас доступны абсолютно все команды Motion какие есть и синхронные и несинхронные 00:34:36 - если у нас привода омроновские - эта привязка переменных оси к переменным PDO сервопривода производится автоматически… 00:35:31 - далее после того, как мы привязали нашу ось к реальному сервоприводу мы переходим в следующую настройку. Здесь мы прежде всего выбираем в каких единицах мы будем работать - могут быть миллиметры, микрометры, нанометры… 00:36:31 - получаем число импульсов на один оборот мотора 00:38:24 - следующая вкладка - здесь мы вводим лимиты… 00:42:04 - следующая здесь мы задаём как будет действовать привод при ошибке и т.д. Мы также здесь задаём максимальные ограничения моментов там Бывают различные применения где-то он чтобы не сломать механику и не должен превышать номинальный Момент 100%... 00:43:58 - следующая вкладка и здесь мы будем выбирать как у нас серво-ось будет выполнять команду MC Home 00:45:41 - вкладка position settings - здесь мы выбираем, в каком режиме у нас будет ось считать данные от нашего сервопривода 00:47:38 - всё параметры мы вбили ось у нас настроена - аналогично сейчас быстро повторим для слейва 00:49:16 – теперь можно практически полностью посмотреть в режиме симуляции и проверить как Оси будут работать – запускаем, смотрим графики 00:51:42 - теперь переходим к написанию программы. Автоматически у нас в глобальных создались две переменные с именами Master… Теперь базовая команда, с которой вообще нужно начинать работу с Motion осью… 00:53:38 - далее, например мы выбираем раздел Motion и видим все команды, которые у нас есть они здесь не разделены по группам, а идут в порядке алфавитном 00:56:16 – смотрим ошибки в мануале 00:56:41 - далее вставим функциональный блок для второй оси 00:58:03 - команда MC Home - при выполнении её либо сервопривод поедет искать позицию, но в нашем случае он её просто обнулит 01:00:59 – MC JOG 01:03:33 – MC Velocity 01:04:36 - MC Stop 01:05:28 - можно создавать здесь свои библиотеки 01:09:18 - следующая обязательная команда будет стоп 01:10:14 - мы написали программу простейшую - хотим проверить 01:12:41 - теперь запустим нашу программу в режиме симуляции 01:17:20 – инструмент Watch - сюда мы можем вывести переменные 01:22:51 – универсальная команда MC MOVE Absolute - команда, которая объединяет в себе две… 01:31:31 - можем посмотреть что это за ошибка Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotВидео от партнеров по настройке сканера iRayple R4000. Установка ПО. настройка, связь теории и практики. В данном видео: - Обзор ПО по настройке сканера. - Разбор доступных параметров. - Подключение к сканеру. - Полезные советы. Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotВ данном очень познавательном, с точки зрения промышленной безопасности (и оценку рисков на производстве), вебинаре вы узнаете: - как индустрия движется к гибкому производству, которое требует рынок - затем посмотрим, как безопасность может касаться нас при реализации этой новой концепции совместного и автономного производства - познакомим вас с услугами Омрон в сфере безопасности (мы рассмотрим некоторые технические аспекты того, как следует применять подход, основанный на оценке рисков) - расскажем, как компания Омрон может оказать вам поддержку на этом пути - и наконец мы рассмотрим несколько реальных примеров успехов, а также некоторые соображения о том как Ковид меняет подход к работе 00:01:03 - переосмысление производства, Омрон поможет вам обеспечить безопасность при внедрении систем совместной работы людей и оборудования, как промышленность переходит из прошлого века, в котором появились производственные линии позволяющие выпускать огромное количество однотипных изделий, к производству с высокой гибкостью, где заказчик имеет возможность полностью индивидуализировать продукт и требует практически немедленного реагирования 00:01:51 - по повестке этого вебинара сегодня 00:02:44 - концепция гибкого производства и высокой степени кастомизации продукта подводит нас к этому графику, где мы можем увидеть, как производство переходит от больших объёмов однотипного продукта к большому разнообразию и низким объёмам, или в будущем к любым объёмам разнообразной продукции… 00:03:37 - коллаборативные роботы помогут нам разработать решения, которые можно гибко настраивать и которые позволяют взаимодействовать с людьми, с другой стороны, мобильные роботы сделают внутреннюю логистику автономной и очень гибкой предлагая широкую линейку моделей с разной грузоподъёмностью 00:04:06,239 производитель оборудования должен соблюдать требуемые правила например требования технического регламента Таможенного союза о безопасности машин и оборудования, давайте подробно рассмотрим аспекты безопасности, с которыми мы столкнемся при внедрении этих систем… 00:05:01 - сегодня количество применения коллаборативных роботов растет, но большинство из них не обеспечивает реального взаимодействия между человеком и роботизированной системой. В основном это ситуация когда нет ограждения, но человек и робот не имеют общего рабочего пространства или последовательная работа, когда человек и робот разделяют общее рабочее пространство но работают по очереди 00:05:48 - безопасности будет необходимо уделять всё больше и больше внимания 00:08:22 - Три основных стандарта для Коботов… 00:08:58 - Стандарт для мобильных роботов 00:10:09 - безопасный робот сам по себе не гарантирует безопасное приложение для конкретного применения необходимо выполнить нормативную оценку риска 00:10:22 - на этом видео показан пример того, как разные типы совместной работы имеют различные условия ограничений, приводящие к разным сценариям использования (смотрим пример упаковки контроллеров в коробку) 00:11:12 – необходим стандартизированный исчерпывающий подход к оценке рисков, тут переведены блок схемы представляющие итерационные процессы и оценки риска для каждого кобота, и автономного мобильного робота. Базовым стандартом для этих процессов всегда будет являться стандарт ISO 12100 00:15:29 - Кроме того при использовании внешних устройств безопасности таких как световые завесы безопасности или лазерные сканеры безопасности для активации функции безопасности робота Омрон помогает выполнить требования стандарта ISO 13855 в отношении минимального безопасного расстояния до опасного объекта… 00:18:17 - здесь мы видим пример успешного взаимодействия, когда оператор выполняет ручную шлифовку бампера автомобиля вместе с Коботом. Благодаря этому проекту мы добились того, чтобы Кобот работал в одном рабочем пространстве одновременно с оператором, что позволило уменьшить площадь, занимаемую системой и свести к минимуму количество ограждений 00:19:49 - и наконец успешное решение, в котором после изучения начального дизайна проекта мы перешли к проведению оценки рисков в соответствии с со средой конечного пользователя и учётом входных данных и стандартов ISO 3691-4 о необходимых величинах зазоров вдоль планируемых траекторий перемещений. 00:20:20 – Covid19 – Безопасная работа с людьми Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobot00:05:45 - Промышленный Робот против Кобота Друзья, выкладываем запись вебинара, где наш бывший коллеги отвечает на злободневный вопрос о сравнении Кобота с классическими промышленными Роботами! То есть сравнивается две руки - классическая и коллаборативная. 00:00:49 – Представление, докладчик Андрей Куприенко, тема 00:05:50 – Появление Коботов – история. 00:08:33 - Коллаборативные роботы набирают свою популярность и завоёвывает место на наших производственных предприятиях 00:08:41 - Отличие коллаборативного робота от традиционного робота 00:13:18 – Система технического зрения она уже есть она достаточно функциональная с её помощью мы можем различать, например положение каких-то объектов, которые робот должен захватывать 00:15:24 - Ручное обучение этого 00:21:44 - Функция ориентирования по соответствующей марке 00:25:39 - Допустим этот коллаборативный робот будет выполнять функцию сборки деталей 00:36:02 - Примеры применений, когда коллаборативный робот может работать вместе с металлообрабатывающими станками, термопласт автоматами ми т. д. 00:45:12 - Робот может обслуживать несколько станков днём, ночью, зимой и летом как говорится… 00:55:16 - Еще одно дополнительное решение, на которое тоже хотелось бы обратить внимание — это разные по своему функционалу и назначению, по точности, либо системы технического зрения, которое позволят оценивать визуальное качество обработки тех или иных деталей… Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotПредлагаем вашему вниманию запись индивидуального обучения, разбитого на несколько частей (заранее извиняемся за наличие посторонних шумов из-за формата обучения, но материал очень полезный для начинающих специалистов и не только). Часть 3 посвящена началу практического освоения разработки и программирования ПЛК Omron в Sysmac Studio, включая Motion (управление синхронными осями). Здесь смотрим как создавать проект, работать с конфигурацией "железа" и разные практические нюансы, в том числе, об EtherCAT 00:00:01 - Что можно создать в Sysmac Studio - Ты можешь, либо работать существующими проектами или можешь создать новый проект здесь указываешь имя тип проекта. 00:00:17 - Проекты могут быть разные - либо ты можешь делать стандартное программирование, т функциональный блок для контроллера, который ты потом можешь тиражировать, виджет для HMI и т. д. 00:01:43 - Как подключиться к существующим устройствам (вот здесь два сервопривода G5, и там дальше ещё MX2, все по EtherCAT) 00:06:23 - Например, тебе нужно понять что по факту сейчас на ПЛК, какая конфигурация... 00:08:11 - Перетягиваем конфигурацию и таким образом я эту конфигурацию которая у меня есть физически 00:13:35 - Важный момент - где смотреть в конфигурации ограничение по модулям и потреблению 00:16:38 - Еще важный момент - у модулей есть область памяти, смотрим чем отличаются какие модули 00:20:00 - Также для некоторых модулей доступна настройка переменных входов-выходов 00:25:35 - Если у тебя какого-то устройства нет сейчас, но он у тебя в проекте должен быть - ты можешь его отключить для того, чтобы без ошибок программу отладить в контроллере 00:25:50 - Для некоторых устройств есть возможность редактировать PDO Map Settings - это собственно говоря, переменные, которыми обмениваются с устройствами. Для одних они недоступны, а для и привода они доступна. 00:28:04 - У частотника есть возможность изменить, расширить переменные, которые ты будешь опрашивать 00:32:58 - Важный ещё момент - Restrictions... Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotКоллеги, предлагаем запись доклада зам. генерального директора, Фонда развития промышленности Шибаева Григория на семинаре компании Элитматик, где трудятся бывшие коллеги по Омрон :-). Тема доклада: Государственные программы финансирования проектов по внедрению робототехнических решений на производствах. Таймкоды: 00:00:16 - Озвучу краткие тезисы, в данном случае я здесь представляю программы, которые работают на всей территории страны. То есть, это мы говорим про программы именно Федерального фонда. Вот в каждом из регионов существуют ещё областные программы, которые практически имеют схоже и назначение и условия но могут отличаться даже ещё более лояльными условиями... 00:01:23 - Любые кейсы мы будем смотреть и подбирать индивидуально самую комфортную программу для финансирования внедрения робототехники. Я покажу на слайде, опять же, типовую программу... 00:02:09 - Верхняя планка указана 200 млн, но на самом деле она может быть и больше, а срок на текущий момент - это до 5 лет... 00:02:45 - Какие могут быть профинансированы решения в области внедрения робототехники... 00:03:52 - Какие предприятия могут воспользоваться данной программой? Поскольку фонд является подведомственной организацией Министерства промышленности Российской Федерации и на регионах это Министерства промышленности, где оно есть - вот то финансированию и подлежит предприятия именно обрабатывающей промышленности. Практически весь раздел с так называемый по ОКВЭД... 00:07:33 - Если все шаги выполняются правильном образом, то вероятность там практически близка к 100% получения средств займа. Вот присутствует и выборка региональная на сайте фонда... Вопросы: 00:11:30 - Сняли ли сейчас ограничение по финансированию проектов по пищевому производству, потому что я знаю что раньше вроде бы не рассматривалось кредитование? 00:11:43 - Смотрите, здесь ситуация она двоякая, вот та программа... 0:12:20 - Допустим пример, у нас максимальная сумма ... региональная 100 млн. Ну в принципе, наверное она покроет большинство заявителей. Вот сегодня я разговариваю в Алтайском крае 150 млн... Поэтому, скорее ответ да готовы работать с предприятиями пищевой отрасли но в рамках региональных бюджетов 00:12:47 - Вот в чате вижу вопрос - В чём ограничение льготного финансирования при научной деятельности? ... Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotПодборка применений Коботов Elite Robots - https://www.youtube.com/playlist?list=PLlx7pvFu7ms82a7OQjk4VVqtRsIm-aNl3Как не попасть на длительный простой производства из-за, например, поломки мощного двигателя? Коллеги, предлагаем интереснейший архивный материал, где Михаил и Александр рассказывают о наработках компании Омрон в области предсказания выхода оборудования из строя и также помимо интересной теории покажут что можно делать на практике. Также практические основы одного из примеров мониторинга состояния оборудования можно посмотреть в нашем видео по ссылке: https://youtu.be/fosaMg-GUnU Несколько переходов по содержанию: 0:01:30 - Начинаем с вводных статистических данных, тенденций роста технологичности оборудования и разрыва в подготовке персонала (продвижение технологий. в которых машины диагностируют свое состояние самостоятельно) 0:02:20 - Сколько тратим времени и ресурсов на замену двигателя 0:04:10 - Классифицируем причины выхода из строя 0:05:00 - Этапы диагностики, подход Омрон 0:06:10 - Причины выхода из строя двигателя, ранжирование неисправностей 0:07:30 - Вибро-диагностика, температурный и токовый анализ 0:08:30 - Вибро-скорость, вибро-ускорение и вибро-перемещение 0:11:00 - Принцип токового анализа 0:11:55 - Коэффициент уровня деградации 0:14:00 - Что мы предлагаем (какие контроллеры) 0:16:10 - Пример подключения системы на предприятии - схема 0:17:30 - Преимущества для пользователя системы 0:18:45 - Пример реализации панели оператора 0:20:00 - Выгоды получаемые заказчиком 0:24:00 - Видеоролик с примерами - как работает устройство 0:26:50 - Устройство температурного мониторинга шкафов управления 0:33:35 -Видеоролик с примерами - как работает устройство температурного мониторинга 0:36:20 - Энергомониторинг 0:37:50 - Процесс оптимизации 0:42:35 - Вступление Александра, вопросы аудитории 0:45:15 - Практическое использование устройств на предприятии Александр Райлян 0:52:15 - Описание машины намотки-размотки пленки (концепция, состав шкафа. схема) 0:58:50 - MQTTвзят за основу передачи данных между оборудованием (принцип работы) 1:01:30 - Описание ПЛК, программной части 1:04:20 - Описание функциональных блоков библиотеки для программирования работы с устройствами и MQTT 1:12:45 - Демонстрация дашбордов, экранов и режимов работы и данных (графики и т. д.) 1:18:25 - Другие примеры применения устройств мониторинга (завод Toyota и т. д.) Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotНа фланце кобота установлена камера технического зрения и лазерный указатель. Камера определяет координаты детали, исходя из которых строится траектория движения кобота. Отследить процесс следования по заданной траектории можно отследить с помощью лазерного указателя, видимого на детали. На производстве данное решение может применяться для автоматизации процесса сварки. Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotКоллеги, выкладываем архивный вебинар по Сканерам штрих кода и Смарт камерам технического зрения компании Omron. Для начинающих изучать данную тематику будут интересны принципы работы данных устройств, которые по сути общие для любых производителей. 00:00:10 – Тема – Новая платформа сканеров штрих-кодов и камер технического зрения MicroHAWK 2.0 00:01:12 – данная продукция применяется в основном для прослеживаемости продукции на предприятиях 00: 01:30– такое оборудование появилось еще в 50-х годах, когда была необходимость считывать коды с железнодорожных вагонов 00:01:55 – Прослеживаемость включает в себя две части – Идентификация и сама Прослеживаемость (комплексная часть системы, связанная с задачами Верхнего Уровня, с Базами Данных и т. д.) 00:02:35 – Почему задачи Прослеживаемости становятся популярными 00:04:05 – Государство заботится о пользователях продукции 00:05:30 – Усиление индивидуальности продукта 00:07:05 – Унификация поставщиков 00:07:15 – Преимущества внедрения прослеживаемости 00:10:30 – О Платформе OMRON MicroHAWK 00:11:00 – Представление всех линеек OMRON на момент записи вебинара (Портфолио) 00:02:00 – Что такое Smart-Камера 00:13:55 – Компания OMRON поглотила компанию Microscan 00:17:50 – За счет чего такое разнообразие моделей (разрешение, скорость, подсветки, интерфейсы, захват, фокус, цвет…) 00:19:55 – Объективы. Где какие применяются примеры. 00:21:55 – Что такое объектив на жидкостной линзе, время реакции мс… 00:23:27 – Набор принадлежности (кронштейны, зеркала, светофильтры, внешняя подсветка…) 00:27:20 – Сканеры штрихкода. Простая работа из коробки, встроено ПО Weblink в сканер (заходим с Браузера и настраиваем) 00:27:30 – Общая информация обо всех сканерах штрих-кода серии V 00:27:55 – Читает любые коды (настроен из «коробки») 00:28:00 – Имеет очень простой интерфейс для программирования и параметрирования 00:29:15 – Автофокус на жидкостной линзе 00:29:20 – Узкий угол зрения (большие расстояния), но высокая оптическая плотность (читаем DPM коды с размером элемента 0,05 мм 00:30:10 – Встроенные протоколы (Ethernet/IP, ProfiNET I/O, ICP/IP, serial 00:30:30 – Компактный дизайн 00:30:40 – Лучшие в классе алгоритмы декодирования 00:31:30 – Два типа лицензии – 1. «P» - Чтение изображения с высоким качеством печати и 2. «X-Mode» - с низким качеством печати (плохая контрастность, прямая печать, изогнутая поверхность) 00:34:10 – Настройка ПО сканера 00:36:30 – Примеры маркировки уникальными кодами Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotКоллеги, выкладываем запись вебинара для начального ознакомления с тематикой технического зрения - какие бывают задачи, как решаются. классификация оборудования и т. д. 00:02:05 - Тенденции рынка и какие проблемы бывают у производителя 00:05:15 - Где и в каких узлах применяется техническое зрение 00:10:10 - История технического зрения Ормон 00:14:52 - Сопутствующие компоненты (ПЛК, панели, датчики...) 00:18:28 - Портфолио Омрон по Техническому Зрению 00:29:10 - Примеры решений 00:29:35 - Контроль созревания сыра.. 00:30:05 - Контроль упаковочного материала 00:31:03 - Контроль уровня налива продукта 00:31:44 - Контроль дефектов (сколов...) 00:32:05 - Контроль продукции при упаковке (крышки, соответствие упаковки, дата, распознавание текста, положение этикетки, штрих-коды, 2Д-коды, оценка качества кода, групповая обработка объектов) 00:40:50 - ТЕХТРЕНДС - опыт создания проектов по техническому зрению 00:43:25 - Порядок выбора системы технического зрения 00:53:30 - Экономическое обоснование применения систем технического зрения 00:56:52 - Примеры внедрения систем технического зрения (дифектирование надписей, контроль качества колпачков, контроль печати листа жести, контроль расположения этикетки и штрих-кода) 01:05:30 - Вопросы - стоимость систем и т.д. Связь с нами: myroborobot@gmail.com https://t.me/roborobot_ru https://www.youtube.com/@roborobotПример реального проекта с компанией ACS TECHNICS по модернизации станка с помощью библиотеки PathControl, позволяющей использовать в универсальном ПЛК Omron G-code. Библиотека работает даже на без-осевых ПЛК. Разберем все тонкости интеграции ПЛК Omron с приводной техникой и удаленной периферии по Ethercat (Omron + Inovance + Veichi) Также выручил функциональный блок, позволяющий осуществлять замкнутый контур на ПЛК Омрон (ФБ FullCloseLoop). Ссылка на документацию по функциональному блоку и пример использования для Sysmac Studio: https://t.me/roborobot_archive/36 В данном видео: 00:00 - Видео работы станка. Вступительная часть. 02:16 - Описание работ. 02:50 - Состав оборудования (Omron, Inovance...по EtherCAT). 04:00 - Шкафы до и после модернизации. 04:44 - За основу взята библиотека PathControl, обзор на нее делали вот тут: https://youtu.be/Qyg7jgqnc8k 06:10 - Сложности. 08:30 - Ручное задание адресов сети EtherCAT. 12:38 - Особенности настройки энкодерных модулей (как достучаться до нужных регистров). 14:55 - Реализация замкнутого контура на ПЛК Омрон (ФБ FullCloseLoop). Далее описание блока 18:05 - Смотрим данные контроллера на графиках с высоким разрешением. 22:03 - Видео работы пульта управления с G-code. Вопросы и предложения принимаем на почту: myroborobot@gmail.com Также подписывайтесь на наши Каналы Ютюб и Телеграмм: t.me/roborobot_ruКоллеги, выкладываем архивное обучение по решениям на G-кодах в ПЛК Omron линейки Sysmac. Решается библиотекой, которая работает даже на без-осевых ПЛК - лайфхак. Проект на панель и ПЛК можно скачать в архивном канале: https://t.me/roborobot_archive/35 В данном видео: - Обзор подходящих моделей ПЛК Omron. - Аппаратное обеспечение. - Использование G-кода. - Функционал и возможности библиотеки PathControl. - Поддерживаемые G-кода. - Состав испытательного стенда. - Практика. - Отладка в режиме симуляции. Подписывайтесь на наши Каналы Ютюб и Телеграмм: t.me/roborobot_ru