Видео: Rosé
Подборка новых видео на тему Rosé на сегодня 18 April 2026 года
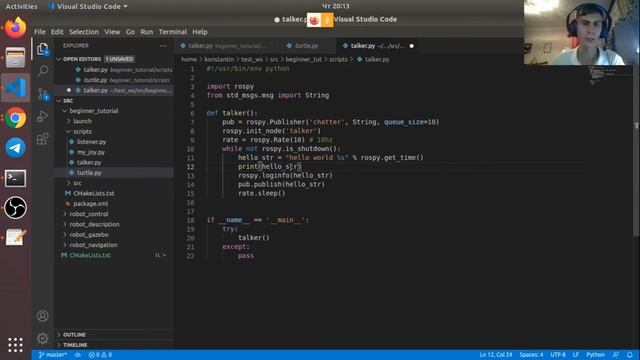
In the previous lesson of the series of lessons on Robot Operating System (ROS), you learned what the Robot Operating System (ROS) is, why we need ROS, Ubuntu test drive, and ROS installation. In this lesson, you will learn how to install Python3, create a ROS workspace, create a ROS package, create simple publishers/subscribers, search ROS packages, delete a ROS package, work with ROSlaunch, and work with rqt which is a ROS visualization tool. ? Contents ? ? (00:00) Introduction ? (00:15) Quick recap of the previous lesson ? (02:04) Agenda of the current lesson ? (02:55) Installing Python3 ? (06:45) Creating a Catkin workspace ? (14:44) Creating a Catkin package ? (01:13:58) Searching ROS packages and deleting them ? (01:21:57)... Смотреть видео...
??????? ???????? ??? ??? ?? ?? ?????? ?????????? ??????? ???? ??????? ??? ??????, ???????????, ????????, ?????????? ?????? ??? ?? ???????? (??? ??? ???). ???? ??? ????????? ( ------------------------------------------------------------------------------------------------------------------------- ???????? ????? ------------------------------------------------------------------------------------------------------------------------- ??. ??? ?? ??????? ??? ?????? ???????? ( ??. ?????????? ??? ??????????? ???? ??? ??????????? ( ??. ?????????? ??? ??? ?????????? ( ??. ???????? ? ??? ??????? ( ??. ??? ?????? ??????? ????? : ??? ?????? ???? ?? ????? ???? '???? ?????? ????' ??? '?????? ??????' ( ??.... Смотреть видео...
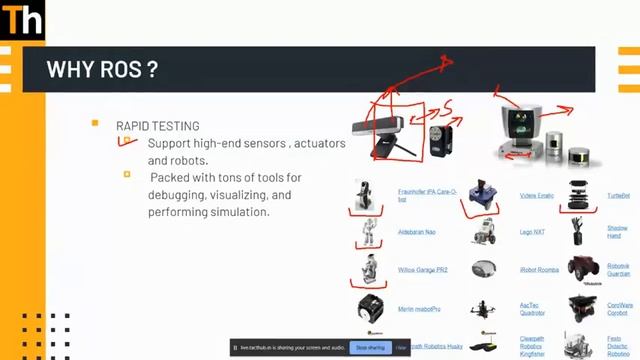
ROS is a commonly used framework for designing complex robotic systems. It is popular for building distributed robot software systems, as well as for its integration with packages for simulation, visualization, robotics algorithms, and more. ROS has become increasingly popular in industry, especially in the development of autonomous vehicles. View the full tutorial playlist: The ROS interface provided by ROS Toolbox lets you: 1) connect to a ROS network from any operating system supported by MATLAB® and Simulink®, 2) leverage built-in functionality in MATLAB and Simulink toolboxes – for example, control systems, computer vision, machine learning, signal processing, and state machine design; and 3) automatically generate stand-alone C++... Смотреть видео...
ROS-совместимый образовательный набор (складской погрузчик)» Опыт проведения образовательной смены для старшеклассников | ROS Meetup 26 | Открытые системы робототехники Ловчиков Дмитрий Владимирович Курчатов центр Как сделать так, чтобы старшеклассники за короткую смену прошли путь от «хочу робота» до работающего прототипа, который не стыдно показывать инженерам и индустриальным партнёрам? В докладе разберу наш практический опыт смен КЦ: как мы проектируем образовательную траекторию вокруг ROS-совместимой платформы складского погрузчика, какие решения в механике/электронике/ПО дают максимальный эффект, и где чаще всего сыпется проект. Отдельный блок — про линейку фанерной спецтехники в стиле ДСТ-Урал: почему фанера и «честная»... Смотреть видео...
Часами выбираешь, что посмотреть? Здесь подскажем, на что стоит потратить время и сразу дадим ссылку на просмотр🔥. А еще здесь вы узнаете последние киноновости и анонсы будущих Голливудских проектов 🎥: ТГ о КИНО: ТГ о СЕРИАЛАХ: ВК о КИНО : Захватывающий мультфильм – «Неисправимый Рон» покажет историю неуклюжего подростка по имени Барни, который учится в обычной школе и проводит время только у компьютера. Однажды его родители покупают мальчику цифровое устройство под названием Рон, который владеет скоростным интеллектом и быстрым подключением к социальным сетям. Однако аппарат придуманный помогать наоборот дает сбой, а затем начинает ошибочно слать неверные советы, которые вскоре отправят Барни и Рона в комические... Смотреть видео...
Сборник красивых песен Алёны Росс | 2024 Автор музыки и слов - Алёна Росс Алёна Росс 01. Алёна Росс - Воздушный поцелуй 00:00 02. Алёна Росс - Забери меня 04:08 03. Алёна Росс, Владимир Ломов - Подарю тебе я счастье 07:40 04. Алёна Росс - Бокал вина11:09 05. Алёна Росс - Дыши 14:58 06. Алёна Росс - Мой Ангел Родной 18:35 07. Алёна Росс - Гудбай Прощай 22:23 08. Алёна Росс - Сладкий вкус любви 26:12 09. Алёна Росс - Мечтаю Таю Таю 30:02 10. Алена Росс - Цветы Земли 33:48 11. Алёна Росс - Люблю тебя я до луны 36:59 12. Алена Росс - Я Буду Нежной 40:53 13. Алёна Росс - Звонок в ночи 45:05 14. Алёна Росс - Любовь с первого взгляда 48:46 15. Алёна Росс - Навстречу ветру 52:32 16. Алёна Росс - Весенний Дождик 56:15 17. Алёна Росс - С... Смотреть видео...
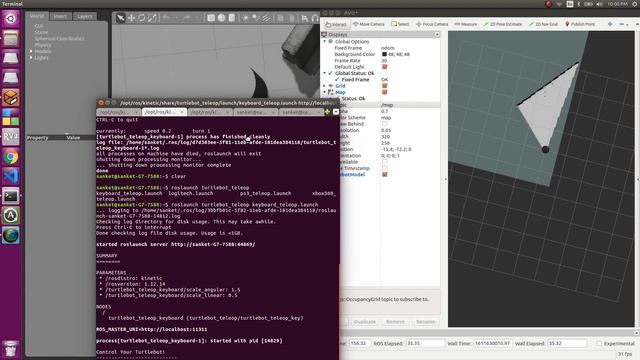
ROS Mapping using ros Gmapping Package ------------ In this video, we map an environment in ROS. We visualize the map using RVIZ (3d visualization tool for ROS bases application). ROS Gmapping package is being used, which uses the occupancy grid-based mapping algorithm. Thus we say its ros mapping, and also ros gmapping. Teleop package has been used to move the turtlebot around to map the environment. ??? To launch gampping for any other robot - 1 Clone - 2. Launch - slam_gmapping_pr2.launch -------------------Time Stamp ------------------------------- 0:00 Introduction to Gmapping 0:26 Launch Turtlebot in Gazebo 0:53 Launch Teleop in ROS 1:52 Launch Gmapping in ROS 2:20 Occupancy Grid Based Mapping 2:35 Launching RVIZ and setting... Смотреть видео...
RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D SLAM approach based on a loop closure detector. The loop closure detector uses a bag-of-words approach in order to determinate if a new image detected by an RGB-D sensor it is from a new location or from a location that it has been already visited. Of course, this is a very summarized explanation, you will get more details on how this loop closure detector works inside this Course. In this course you will learn how to perform RGB-D SLAM by using the rtabmap_ros package. At the end of the course, the following topics will have been addressed: - Basics of RTAB-Map - How to use the rtabmap_ros package - How does loop closure detection work internally - How to generate a 3D Map of... Смотреть видео...
В этом видео была рассмотрена навигация колёсного робота в ROS. Спасибо большое за проведённую лекцию Родиону Анисимову. Ссылка на его YouTube канал Ссылка на презентацию Инструкции из видео (заменить noetic на вашу версию ROS): sudo apt update sudo apt upgrade sudo apt install ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-gmapping ros-noetic-navigation mkdir ws cd ws mkdir src cd src git clone -b noetic-devel git clone -b noetic-devel git clone -b noetic-devel cd .. catkin_make Добавить в конец файла .bashrc, строчку export TURTLEBOT3_MODEL=burge source ~/.bashrc source devel/setup.bash roslaunch turtlebot3_gazebo turtlebot3_world.launch roslaunch turtlebot3_bringup turtlebot3_remote.launch roslaunch... Смотреть видео...
Мы продолжаем нашу рубрику «Инвестиции для начинающих». Сегодня мы разберем коэффициенты ROE ROA ROS и узнаем, как c их помощью можно оценить акции компании перед покупкой! Коэффициенты рентабельности позволяют оценить эффективность деятельности компании. Обычно они используются для измерения прибыли, полученной компанией в течение определенного периода времени, основываясь на уровне продаж этой компании, ее активов, капитала и прибыли на акцию. #Акции #Дивиденды #Инвестиции ---------------------------------------------------------------------------------------- Инвестиции в акции сша,Инвестиции для начинающих,инвестиции, инвестиции для начинающих, инвестиции в акции, акции, как начать инвестировать, инвестирование, куда... Смотреть видео...
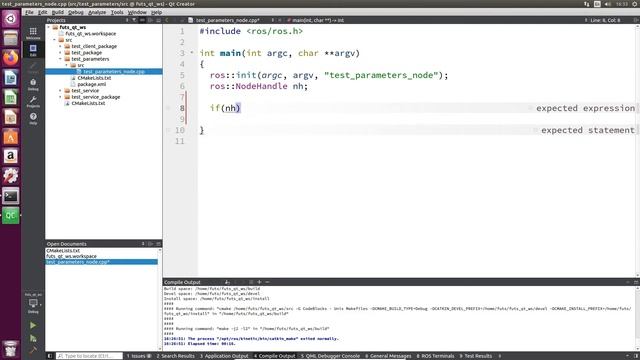
В указанном уроке пользователи познакомятся с таким инструментом ROS, как параметры. Познакомятся с именами параметров. Узнают о способах использования параметров: утилиты rosparam и использования программного интерфейса. Напишут код для загрузки параметров из системы, проверят его работоспособность. Разберут, как правильно задать частный параметр, в том числе и через командную строку. 00:00. Музыка 00:13. Вступление 01:28. Имена параметров 03:34. Утилита rosparam и ее команды 05:58. Проверка работоспособности утилиты rosparam. Часть 1 09:00. Проверка работоспособности утилиты rosparam. Часть 2 11:34. Использование программного интерфейса по доступу к пара метрам. Введение. 12:02. Создание пакета узла параметров 13:04. Создание узла 13:52... Смотреть видео...






![ROSE (ROSÉ) - NUMBER ONE GIRL [K-POP RUS COVER BY SONYAN]](https://pic.rtbcdn.ru/video/2026-04-16/31/2f/312f38c718624e6714b8c7d15a9332aa.jpg)


















![ROSE (ROSÉ) - NUMBER ONE GIRL [K-POP RUS COVER BY SONYAN]_320k](https://pic.rtbcdn.ru/video/2026-04-14/2d/41/2d416b84f4a4251a0f8246ccda47b17b.jpg)


![Lian Ross - Say You'll Never (Original Extended Version) [HD/HQ]](https://pic.rtbcdn.ru/video/f2/f3/f2f33d4c2581a6552b23af3b628e8a7b.jpg)












![On The Ground (Rosé)-[Кириллизация]](https://pic.rtbcdn.ru/video/67/3e/673e7e80c79e3e790b3829acdfeab7c7.jpg)
![5| Install ROS Melodic - ROS Melodic تسطيب [ROS بالعربى]](https://pic.rtbcdn.ru/video/d9/0d/d90d0442adeb350a3893bb8ec878c419.jpg)











![[ROS Tutorial] RTAB-Map In ROS 101](https://pic.rtbcdn.ru/video/de/0d/de0d9eee74b90070422d886ca8bab27e.jpg)